
A. René Geist
Postdoc, University of Tübingen
rene.geist [AT] uni-tuebingen.de
About
I'm a postdoc at the Tübingen AI Center focused on AI-driven robot simulation and control. Simulation is a cornerstone of modern robotics as many of today's most impressive real-world stunts - such as humanoid robots jumping over obstacles - are first learned in carefully designed virtual environments. The fidelity and structure of these simulators strongly shape what robots can ultimately achieve outside the lab.
My research develops high-capability simulations of the physical world by combining machine learning with computational physics. Current challenges I work on include differentiable contact dynamics, AI-driven particle simulations, narrowing the sim-to-real gap, efficient domain randomization, and modeling soft-body interactions, among others.
Publications
Most recent publications on Google Scholar.
A star besides an author's name indicates equal contribution.
SoftJAX and SoftTorch: Empowering Automatic Differentiation Libraries with Informative Gradients
Anselm Paulus*, A. René Geist*, Vít Musil, Sebastian Hoffmann, Georg Martius
February 2026
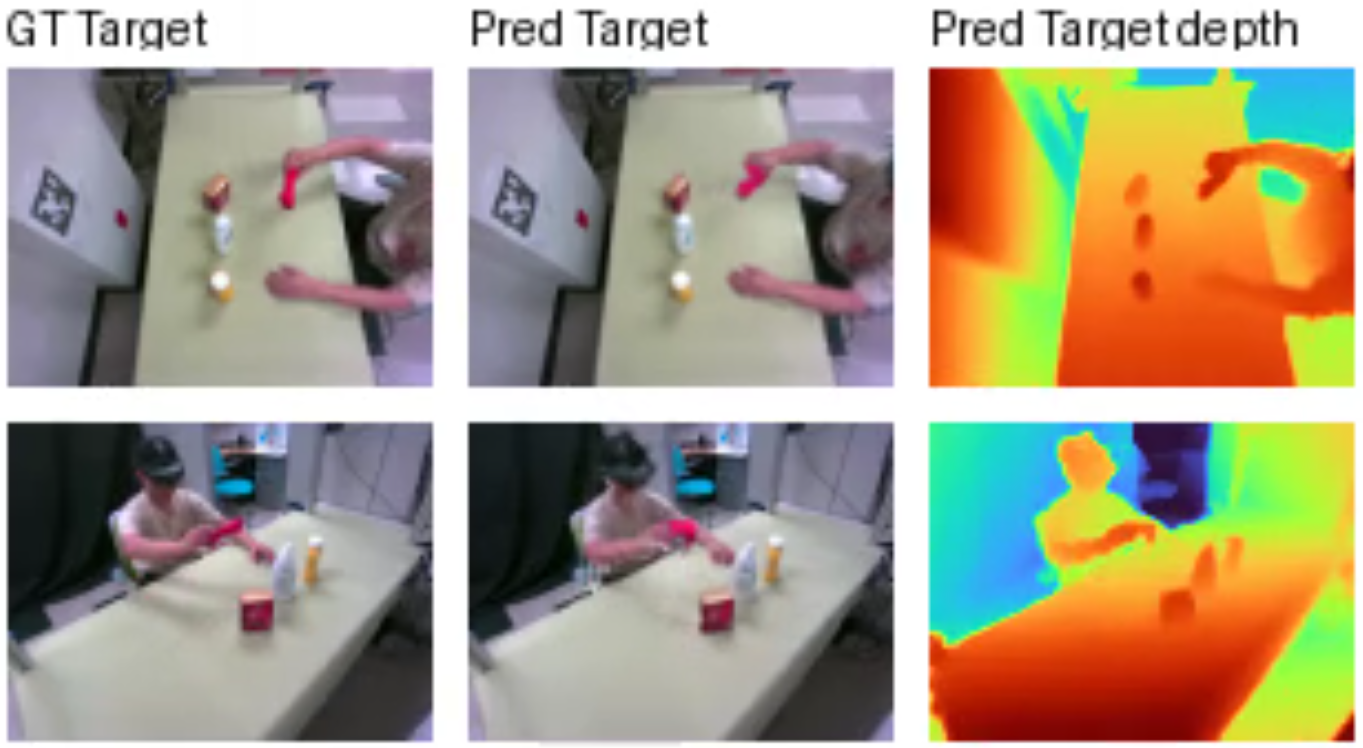
Learning 3D-Gaussian Simulators from RGB Videos
Mikel Zhobro, A. René Geist*, Georg Martius*
February 2026
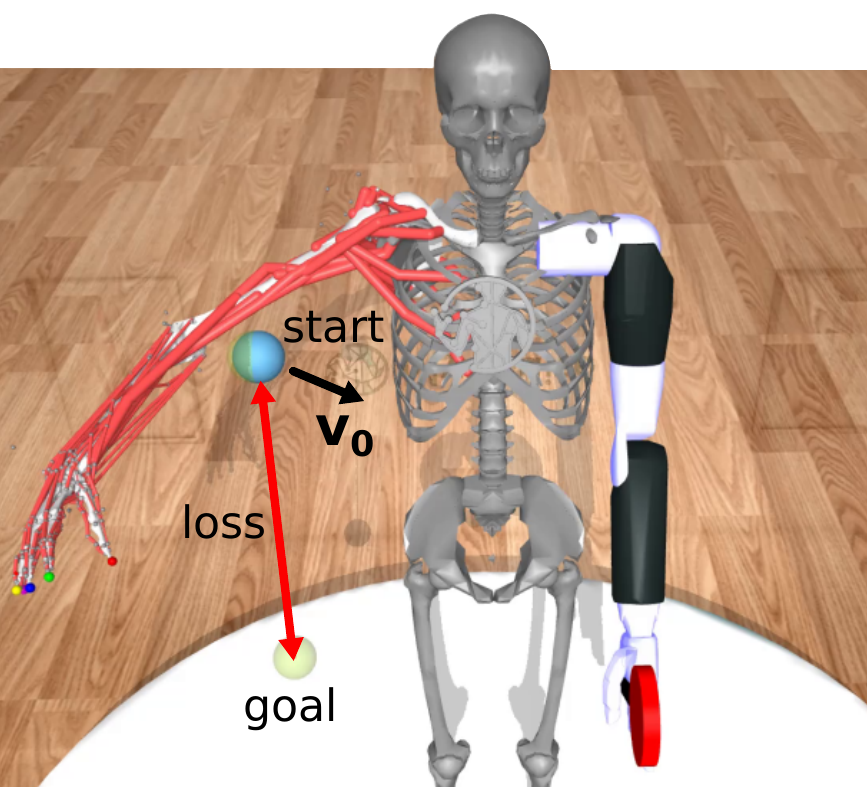
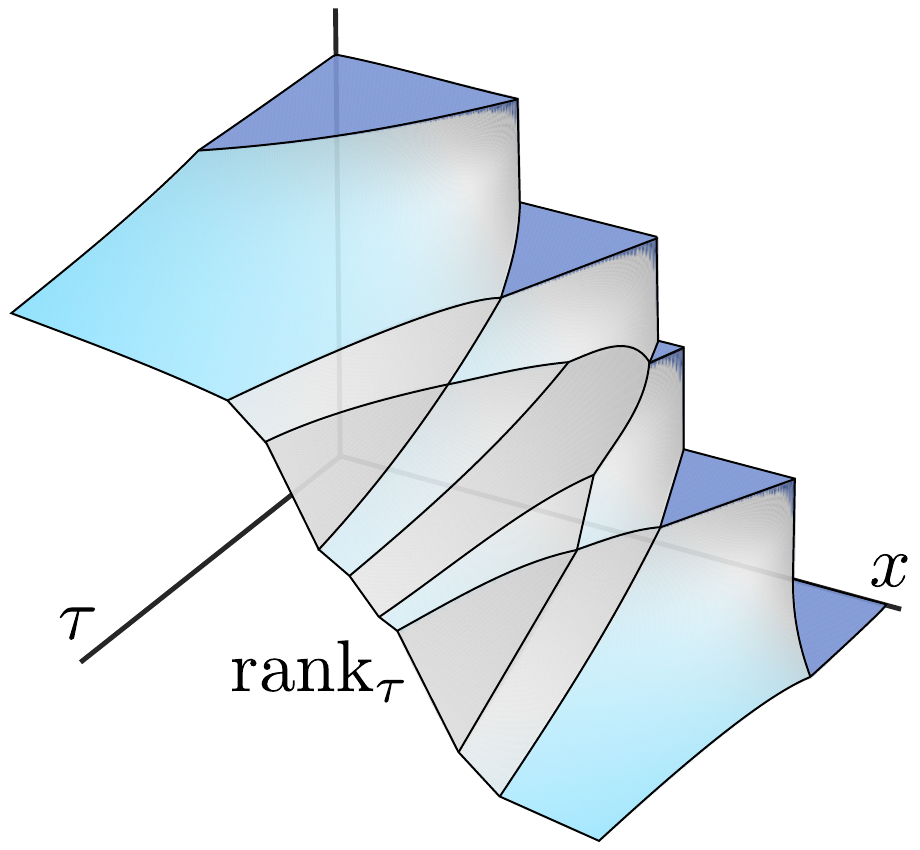
Hard Contacts with Soft Gradients: Refining Differentiable Simulators for Learning and Control
Anselm Paulus*, A. René Geist*, Pierre Schumacher, Vít Musil, Georg Martius
ICLR'26: International Conference on Learning Representations. 2026.
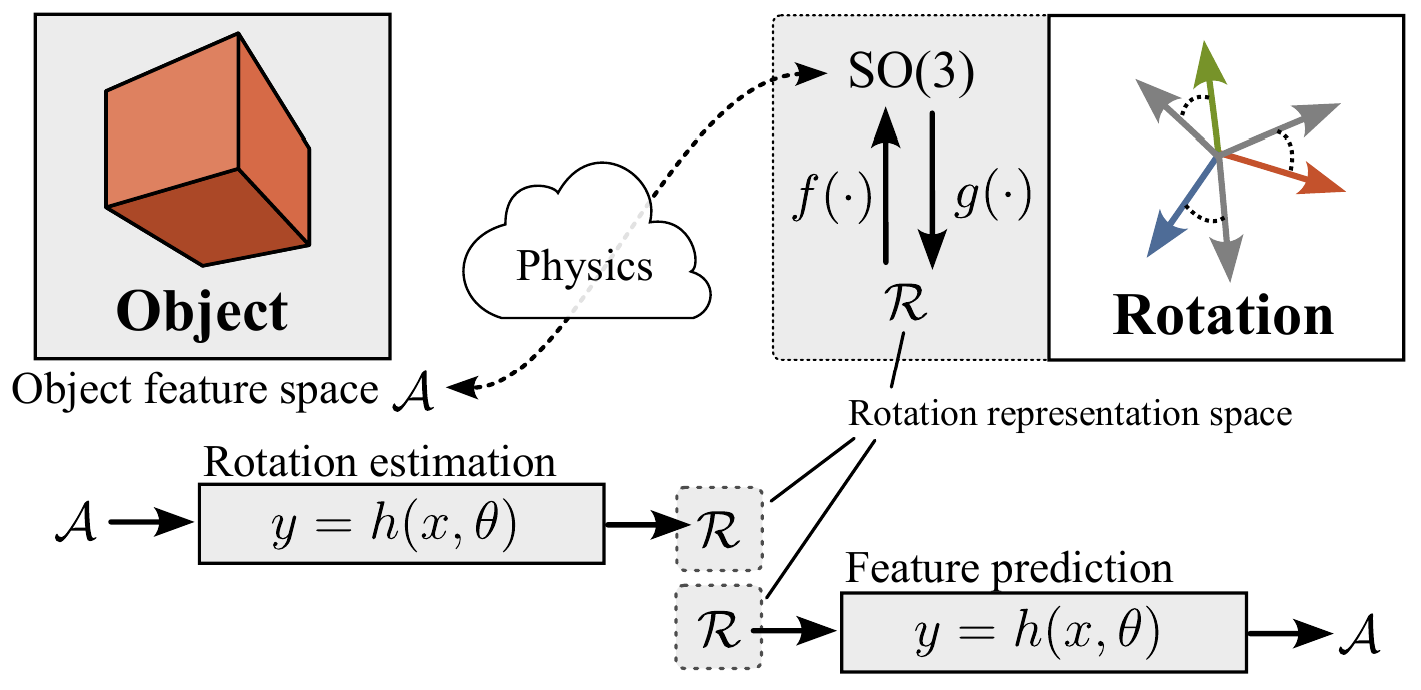
Learning with 3D rotations, a hitchhiker's guide to SO(3)
A. René Geist, Jonas Frey, Mikel Zhobro, Anna Levina, Georg Martius
ICML'24: International Conference on Machine Learning. 2024.

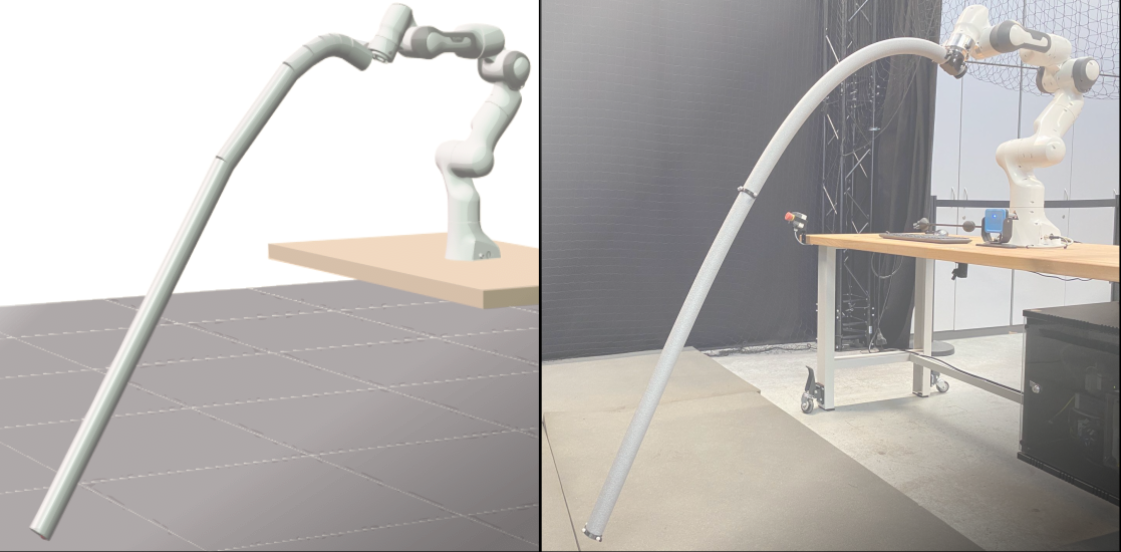
Learning Deformable Linear Object Dynamics From a Single Trajectory
Shamil Mamedov, A. René Geist, Ruan Viljoen, Sebastian Trimpe, Jan Swevers
IEEE Robotics and Automation Letters. 2025.

The Wheelbot: A jumping reaction wheel unicycle
A. René Geist, Jonathan Fiene, Naomi Tashiro, Zheng Jia, Sebastian Trimpe
IEEE Robotics and Automation Letters. 2022.
SoftJAX and SoftTorch: Empowering Automatic Differentiation Libraries with Informative Gradients
Anselm Paulus*, A. René Geist*, Vít Musil, Sebastian Hoffmann, Georg Martius
February 2026
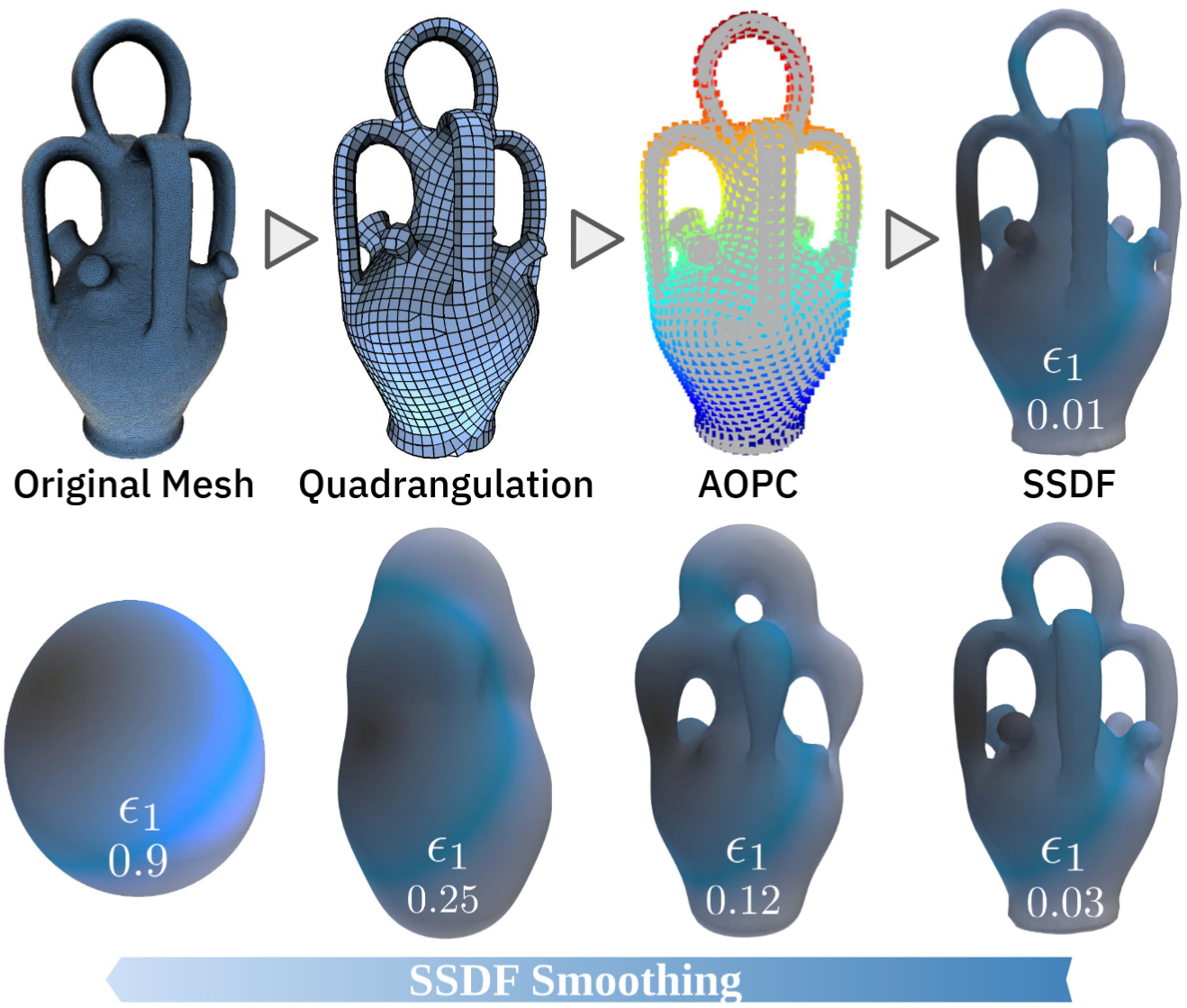
Smoothly Differentiable and Efficiently Vectorizable Contact Manifold Generation
Onur Beker, A. René Geist, Anselm Paulus, Nico Gürtler, Ji Shi, Sylvain Calinon, Georg Martius
January 2026
Learning 3D-Gaussian Simulators from RGB Videos
Mikel Zhobro, A. René Geist*, Georg Martius*
February 2026
Hard Contacts with Soft Gradients: Refining Differentiable Simulators for Learning and Control
Anselm Paulus*, A. René Geist*, Pierre Schumacher, Vít Musil, Georg Martius
ICLR'26: International Conference on Learning Representations. 2026.
A Smooth Analytical Formulation of Collision Detection and Rigid Body Dynamics With Contact
Onur Beker, Nico Gürtler, Ji Shi, A. René Geist, et al.
IROS'25: IEEE/RSJ International Conference on Intelligent Robots and Systems. 2025.
Learning with 3D rotations, a hitchhiker's guide to SO(3)
A. René Geist, Jonas Frey, Mikel Zhobro, Anna Levina, Georg Martius
ICML'24: International Conference on Machine Learning. 2024.
Learning Deformable Linear Object Dynamics From a Single Trajectory
Shamil Mamedov, A. René Geist, Ruan Viljoen, Sebastian Trimpe, Jan Swevers
IEEE Robotics and Automation Letters. 2025.
Pseudo-rigid body networks: learning interpretable deformable object dynamics from partial observations
Shamil Mamedov*, A. René Geist*, Jan Swevers, Sebastian Trimpe
IROS'24: IEEE/RSJ International Conference on Intelligent Robots and Systems. 2024.
The Wheelbot: A jumping reaction wheel unicycle
A. René Geist, Jonathan Fiene, Naomi Tashiro, Zheng Jia, Sebastian Trimpe
IEEE Robotics and Automation Letters. 2022.
Physics-informed regression of implicitly-constrained robot dynamics
A. René Geist
PhD Thesis, University of Stuttgart. 2022.
Using physics knowledge for learning rigid-body forward dynamics with Gaussian process force priors
Lucas Rath*, A. René Geist*, Sebastian Trimpe
CoRL'22: Conference on Robot Learning. 2022.
Structured learning of rigid-body dynamics: A survey and unified view from a robotics perspective
A. René Geist, Sebastian Trimpe
GAMM-Mitteilungen, Special Issue: Scientific Machine Learning. 2021.
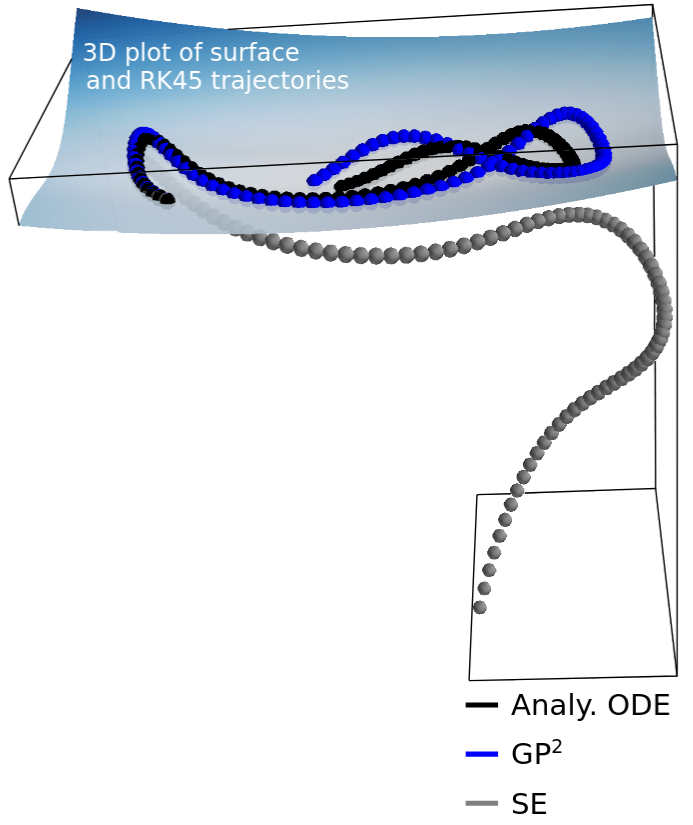
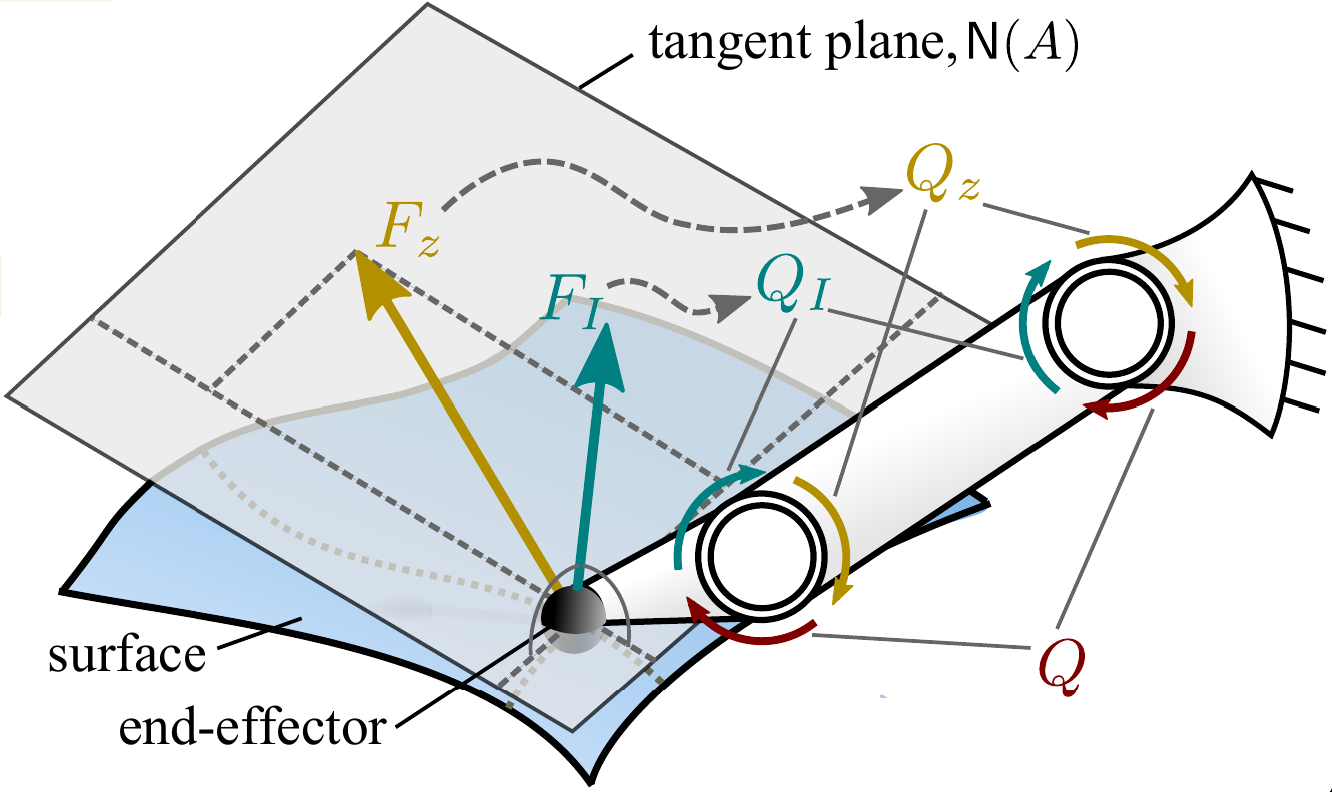
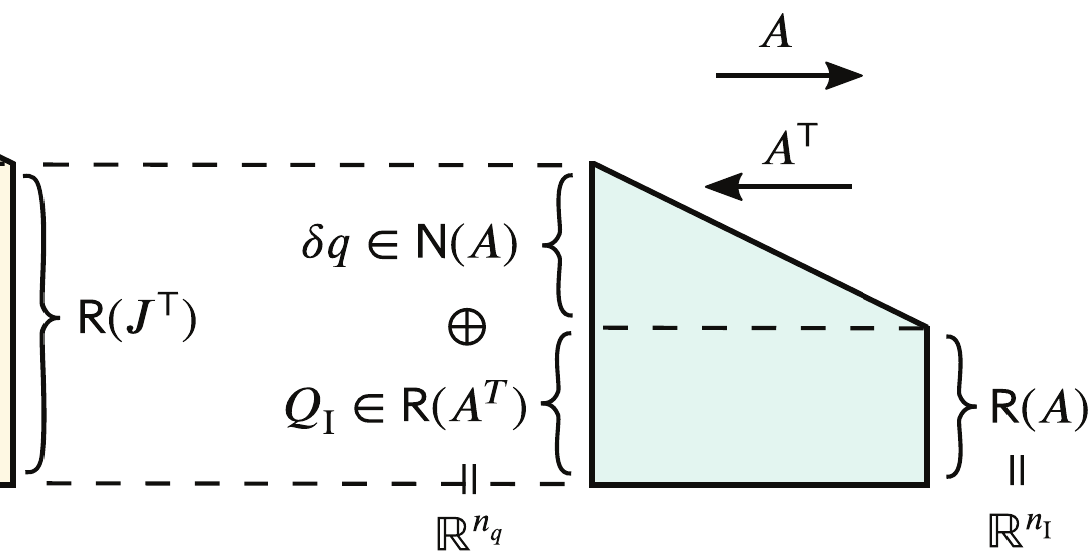
Learning constrained dynamics with Gauss principle adhering Gaussian processes
A. René Geist, Sebastian Trimpe
L4DC'20: Conference on Learning for Dynamics and Control. 2020.
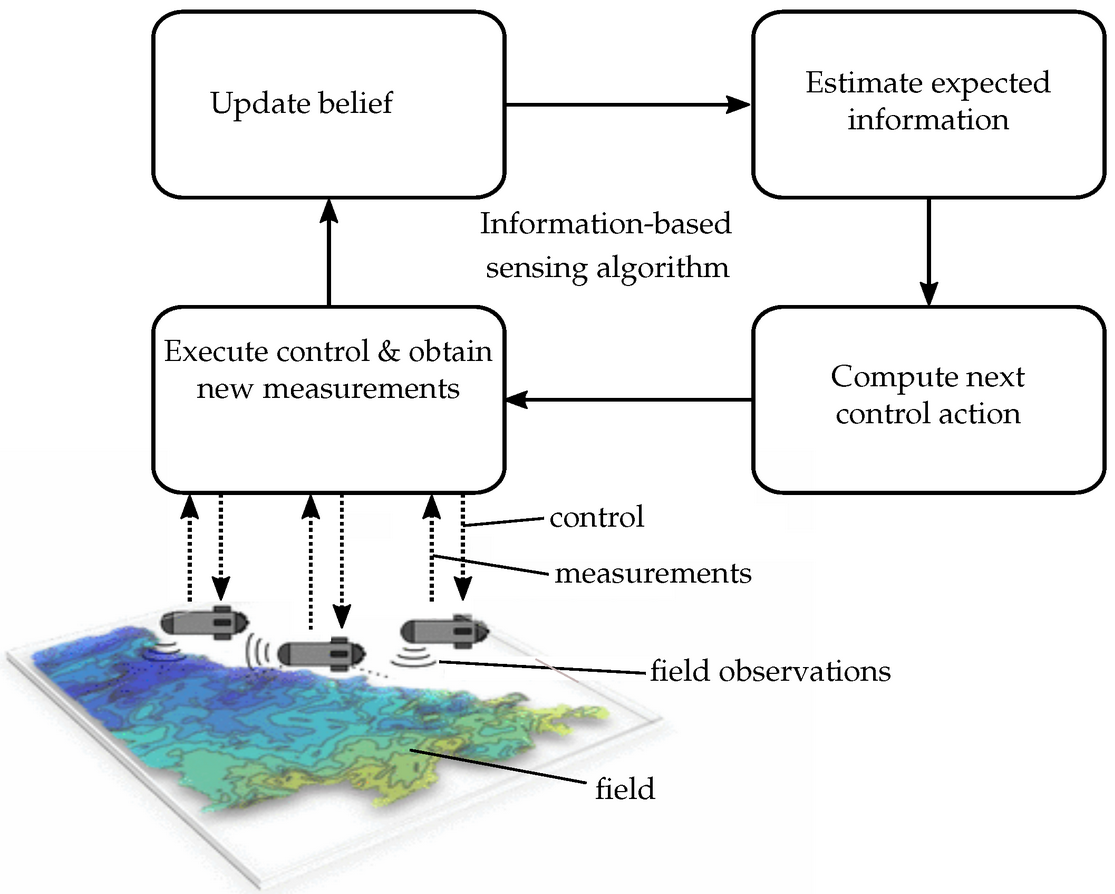
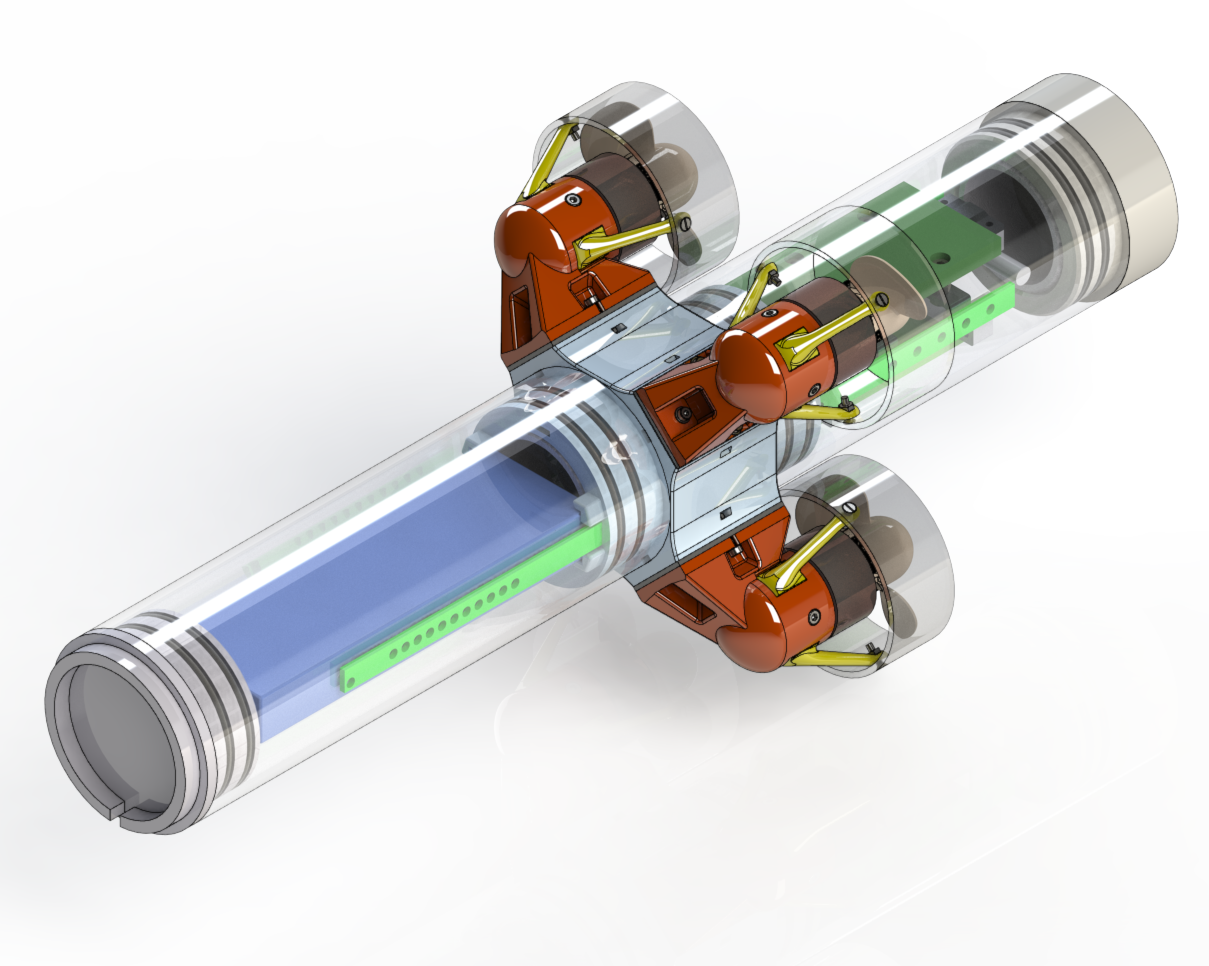
Learning environmental field exploration with computationally constrained underwater robots: Gaussian processes meet stochastic optimal control
Daniel Andre Duecker*, Andreas René Geist*, Edwin Kreuzer, Eugen Solowjow
Sensors. 2019.
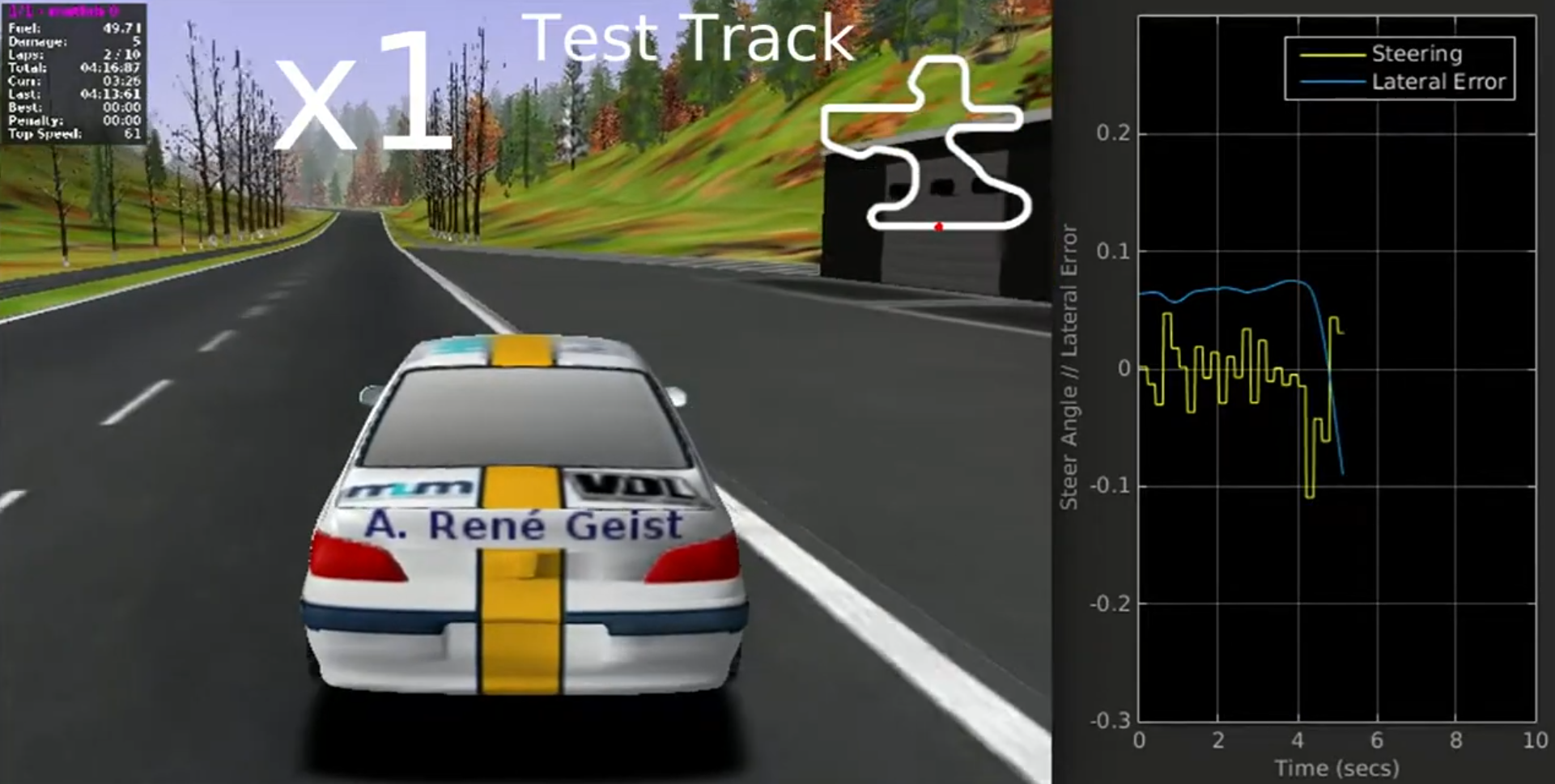
Data collection for robust end-to-end lateral vehicle control
A. René Geist, Andreas Hansen, Eugen Solowjow, Shun Yang, Edwin Kreuzer
DSCC'17: ASME Dynamic Systems and Control Conference. 2017.
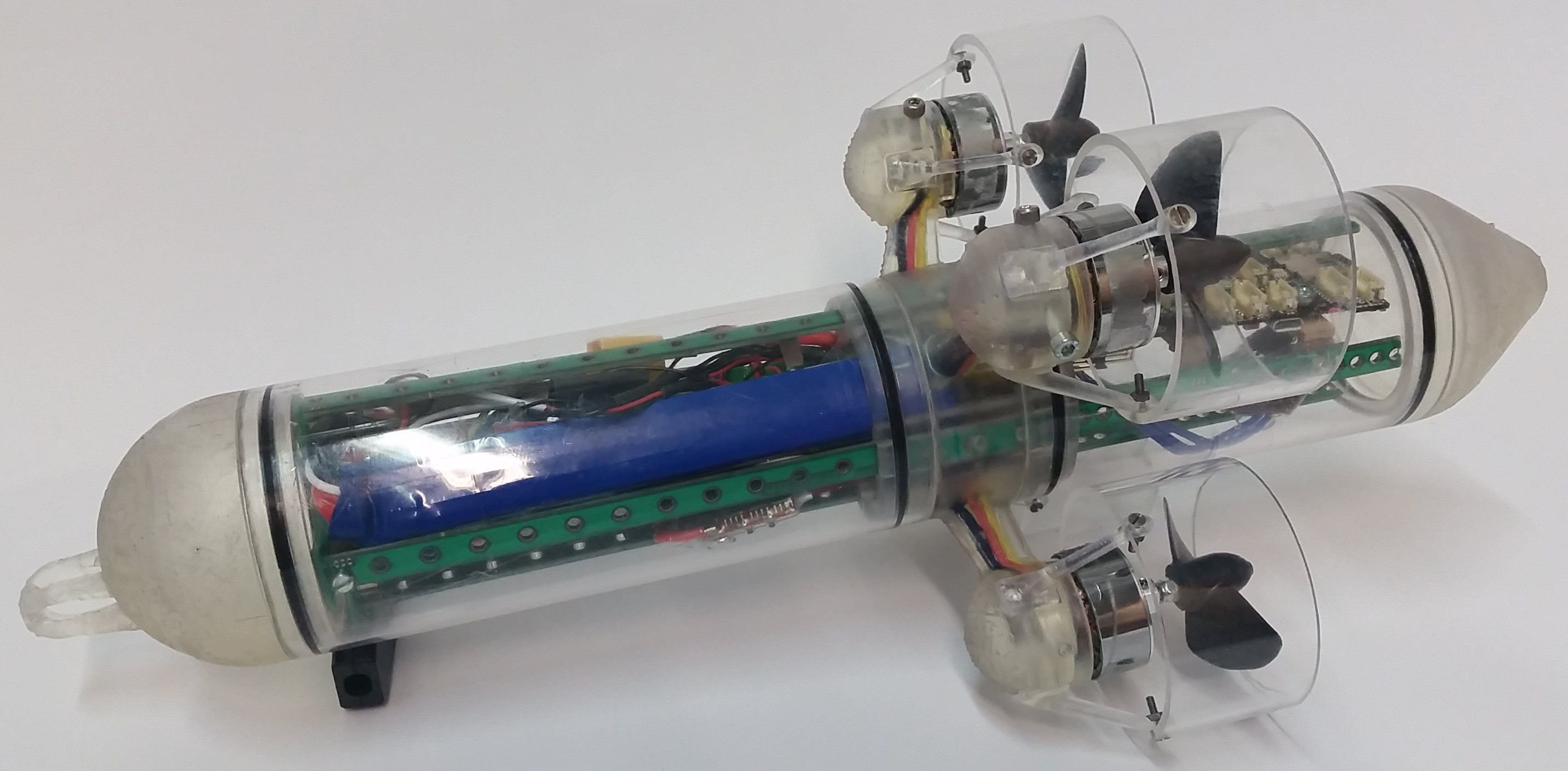
Embedded spherical localization for micro underwater vehicles based on attenuation of electro-magnetic carrier signals
Daniel-André Duecker, A. René Geist, Michael Hengeler, Edwin Kreuzer, Marc-André Pick, Viktor Rausch, Eugen Solowjow
Sensors. 2017.
Towards a hyperbolic acoustic one-way localization system for underwater swarm robotics
Andreas René Geist, Axel Hackbarth, Edwin Kreuzer, Viktor Rausch, Michael Sankur, Eugen Solowjow
ICRA'16: IEEE International Conference on Robotics and Automation. 2016.
Teaching
University of Tübingen · Georg Martius
Value estimation with Monte Carlo and TD learning
University of Tübingen · Georg Martius
University of Tübingen · Georg Martius
Ridge regression, Bayesian regression, Decision trees, Random Forest
University of Tübingen · Georg Martius
From discrete to continuous deep reinforcement learning
University of Tübingen · Georg Martius
RWTH Aachen · Prof. Sebastian Trimpe
RWTH Aachen · Prof. Sebastian Trimpe
Learning dynamics with probabilistic models
RWTH Aachen · Dr. Dominik Baumann
Vita
I'm a postdoc working with Georg Martius at the University of Tübingen (until recently we've been located at the MPI-IS). During my PhD supervised by Sebastian Trimpe at the Max Planck Institute for Intelligent Systems, I worked on physics-informed machine learning of implicitly-constrained robot dynamics. In collaboration with Jonathan Fiene, we developed the "Wheelbot" being a robot platform for teaching control theory and robotics.
I worked on end-to-end vehicle control as a research intern at the Vehicle Dynamics and Control laboratory of the University of California, Berkeley. During my Master's in Theoretical Mechanical Engineering at TU Hamburg, I worked as a research student on autonomous field exploration via AUV swarms working with Eugen Solowjow.
-
University of Tübingen & MPI-IS Tübingen 2023 - nowPostdoc
Autonomous Learning Group (Georg Martius) -
RWTH Aachen 2022Postdoc
Data Science in Mechanical Engineering (Sebastian Trimpe) -
MPI-IS Stuttgart 2018 - 2022Ph.D. Student
Intelligent Control Systems (Sebastian Trimpe) -
UC Berkeley 2017Research Intern
Vehicle Dynamics and Control Laboratory -
TU Hamburg 2014 - 2018M.Sc. Student
Theoretical Mechanical Engineering